前言
說是從零開始做四軸其實也不太算,因為之前已經做過,
很久了,對四軸的最初印象是在寶萊塢電影"三個傻瓜"裡,但有想做的想法應該是2011年(大二下)時,在自控社辦跟其他朋友討論比賽可以拿甚麼作品參加,當時打算做一個可以作室內規劃路徑與空間定位的四軸,不過說歸說,比賽也沒參加,最後自己也跑去玩 FPGA、學計組,忘記甚麼原因,2012年(大三下)打算跨系參加電機系的專題競賽,就把這個想法再搬出來,最後實作一年的結果離一開始預期的功能相當遙遠,但在物理系背景下,看了不少書與不斷 try & error 的調 PID,一年內還是可以做出一台免強平衡的四軸,
詳細可以參考
→四軸飛行器_研究紀錄
→[QCopter] 自製四軸飛行器
從陽春的洞洞板做起,自己設計電路、焊接、驅動、通訊、姿態算法、平衡控制,到之後把洞洞版本的飛控板、遙控器設計成 PCB 版本送廠打樣,不斷的改版,不斷的更新,當時就有想做一台全部自己設計的四軸飛行器,從最基本的機構、算法到電調、飛控、遙控器等(馬達、電池、螺旋槳就算了),一台全部開源、適合做研究、學習、實現演算法的四軸飛行器 QCopter。
最初的構想是以小型四軸加上無刷馬達為主,而且馬達、螺旋槳需要取得容易,所以設計了一台 160mm 軸距的四軸,雖然設計圖畫好,但口袋一直空空,一直沒有試過... 畢竟買一個商品價格跟開發一個的成本是天差地遠。
雖然到現在已經過了快兩年了,不過一個人要做完全部還是需要不少時間的,可能幾年後才有機會面市吧... 哈哈,反正先把之前與現在的構想紀錄下來,一步一步的實現。
以研究與學習方面,以下幾點是設計的考量:
硬體、軟體、基本演算法必須開源,方便模仿、學習、修改、重製。
製作成本與門檻盡量低,以具備基本手做能力與開發能力的對象為主。
一個高效能、資源豐富的控制器對實現演算法的可能性與種類有很大的幫助。
飛行器先以小型、室內為主,減少危險以及增加開發、實驗方便性(坐著也可以開發)。
容易擴充、新增硬體、應用,畢竟研究、學習也是要跟上時代的。
演算法相關的有數學流程與軟體模擬更好。
下面是 QCopter 預計要實現的部分,目前先以飛行器和遙控器這兩部分為主。
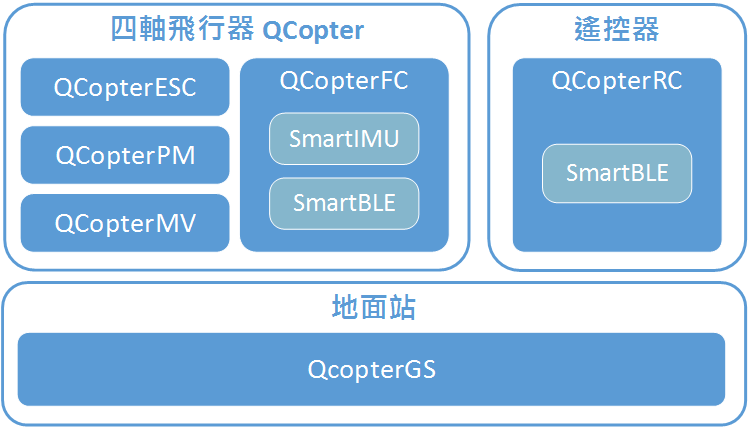
飛行器部分:
打算以 200mm 軸距與 5-inch 的槳為主,與之前設計大了些,但相對的負載也增加了,在飛行器底下預留相機腳架的接口,方便連接攝影用萬向雲台,使在調整參數與測試時的難度減少、便利性增加,另外會設計一個 2 維的雲台來固定 QCopterMV。
飛控板 QCopterFC
實現運動、平衡方面的演算法,最重要的核心裝置,上面裝載 SmartIMU 與 SmartBLE,SmartBLE 尚未設計,天線與功率放大部分尚在實驗,預計以 nRF51 或 nRF52 系列做為主控器,主要用來做 BLE 或 2.4G 傳輸,目前預計透過 CAN Bus 來做為 QCopterESC 與 QCopterPM 之間的溝通方法,但沒用過 CAN Bus 所以可行性還未知。電子調速器 QCopterESC
驅動無刷馬達的裝置,預計採用 Field Oriented Control (FOC) 技術,透過採樣電流來找出轉子位置做控制,並且可以回授轉速、電流、溫度等資訊到 QCopterFC 和 QCopterPM 上面,基本功能都有完成的話,再加入自適應控制,可以自動補償電機參數。電源管理 QCopterPM
飛行器的電源管理裝置,除了管理、監控與檢測飛行器上的電池電量、用量、電流與狀況外,也打算具備無線充電的功能。機械視覺 QCopterMV
實現影像處理的裝置,預計採用 MT9V034 攝像頭,具有灰階與彩色兩種版本,可以針對不同的處理需求做替換,實現光流、特徵辨識等演算法。
控制部分:
遙控器 QCopterRC
遙控飛行器的裝置,最重要的是具有螢幕,可以直接將飛行器上回傳的資料顯示出來,遙控器上打算加入加速度計與陀螺儀,用來實現體感控制。地面站 QCopterGS
這部分偏向室外的應用,室內的部分預計以矩陣燈搭配影像處理為主(如下述的應用),其實在想室內的部分要不要分出來,畢竟不太像地面站。
目前有幾個想實現的四軸應用:
空間定位
這是最一開始想做的,可靠的實現方法都是加載高速攝影機,但這缺點就是照價高,自己打算以低成本的 IMU / RSSI 方案來實現飛行器的空間定位,因為室內定位也是自己的研究的題目,所以這部分已算是進行中了,整個最大的難點應該是飛行器產生的噪音與干擾,誤差若可以在限制在 30cm 內覺得就很不錯了。
飛行器間通訊
之前過一篇透過聲波傳遞訊息的病毒 badBIOS (詳細文章),除了RF,聲波確實是一個非常有效的交換訊息方法,每天都在說話,每天都在用嘴巴和耳朵傳遞與接收訊息,但在飛行器上自己卻常常忽略,若是飛行器有聽與說的能力,那在協同合作方面的肯定會有許多應用。
最直覺的想法是喇叭和麥克風,喇叭依照想傳遞的範圍傳出不同頻率與振幅的訊號來夾帶資料,若只要濾除螺旋槳聲,整體難度應該不大,但真的想做看看的是自己的指導教授隨口講的一個想法,透過螺旋槳或馬達轉速來發出不同頻率的聲音,跟電調讓無刷發聲的概念類似,若資訊量不大應該是不會影響到平衡和飛行,而且也可以有效的減少成本。
飛行器導引
這是之前參加比賽所想的一個慨念,最初的想法是結合GPS在不同的塔台間自動的移動與起降,主要是為了降低和解決飛行器續航力不足的問題,塔台透過矩陣燈與飛行器上的機械視覺來實現起降定位的功能,不過之後想到了一個延伸的有趣應用,一組矩陣燈可以用來傳遞訊息給飛行器,實現上下運動甚至空翻的指令,若多組的矩陣燈,就可以讓飛行器前後左右移動,或許意義不大,但在室內展示上卻有不錯的視覺效果,藉由電腦來控制矩陣燈圖案,就可以讓飛行器依自己想走的路徑運動或是做出特定動作。