運動原理
四軸飛行器具有以下優點:
1、體積小、重量輕
2、機構簡單
四軸飛行器與直升機最大的不同處在於,直升機透過主旋翼的傾斜與葉片攻角來實現不同的運動,並且靠尾旋翼來抵銷主旋翼產生的反作用力,這種設計使得直升機的機構較為複雜,同時當主旋翼無法工作時即無法飛行,產生升力,而四軸飛行器則透過四個旋翼來互相抵銷反作用力,並且透過不同的升力,來實現不同的運動,詳細會面會在說明,下面有一個影片,可以告訴你四軸飛行器的結構可以多簡單。
Youtube - diy drone it yourself v1 0
https://www.youtube.com/watch?v=TQhHO7UvazA
影片中可以看出來,飛行器只需要四個螺旋槳,放置間距與位置不要太誇張,基本上都可以平衡與飛行,一個四邊對稱的機構(正方形)與非對稱的機構(這裡指的是非正方形,像是梯形、長方形、平行四邊形)差別僅在於飛行器的模型複雜程度,將對稱機構的模型用在非對稱的機構上只是容易在控制上產生誤差,說白了就是不容易達到你想要的結果,非對稱的程度越大、就越效果就越差,所以大部分的四軸為了在控制上簡單,通常都會使用對稱的機構來簡化控制上的問題。
3、機動性高
下面有一個影片,可以告訴你四軸飛行器機動性如何,最高時速應該有超過 100 km/hr。
Youtube - minicp120 x2208 2000kv 6x4.5 hqprop kiss esc 18a nanowii 4s1800 40c
https://www.youtube.com/watch?v=8p5uDf9i_Yc
RC Groups - quadmovr's blog
http://www.rcgroups.com/forums/member.php?u=534985
4、演算法核心
並不是說其他都不重要,機構、螺旋槳等都會影響飛行器的效能,只是合理設計的簡單機構、螺旋槳等即可提供一個穩定飛行的平台,所以飛控板上的核心演算法就成主宰飛行器運動與平衡的主要部分,而任何的應用實現也在於此部分,這個人認為也是在學術上的一個研究優勢。
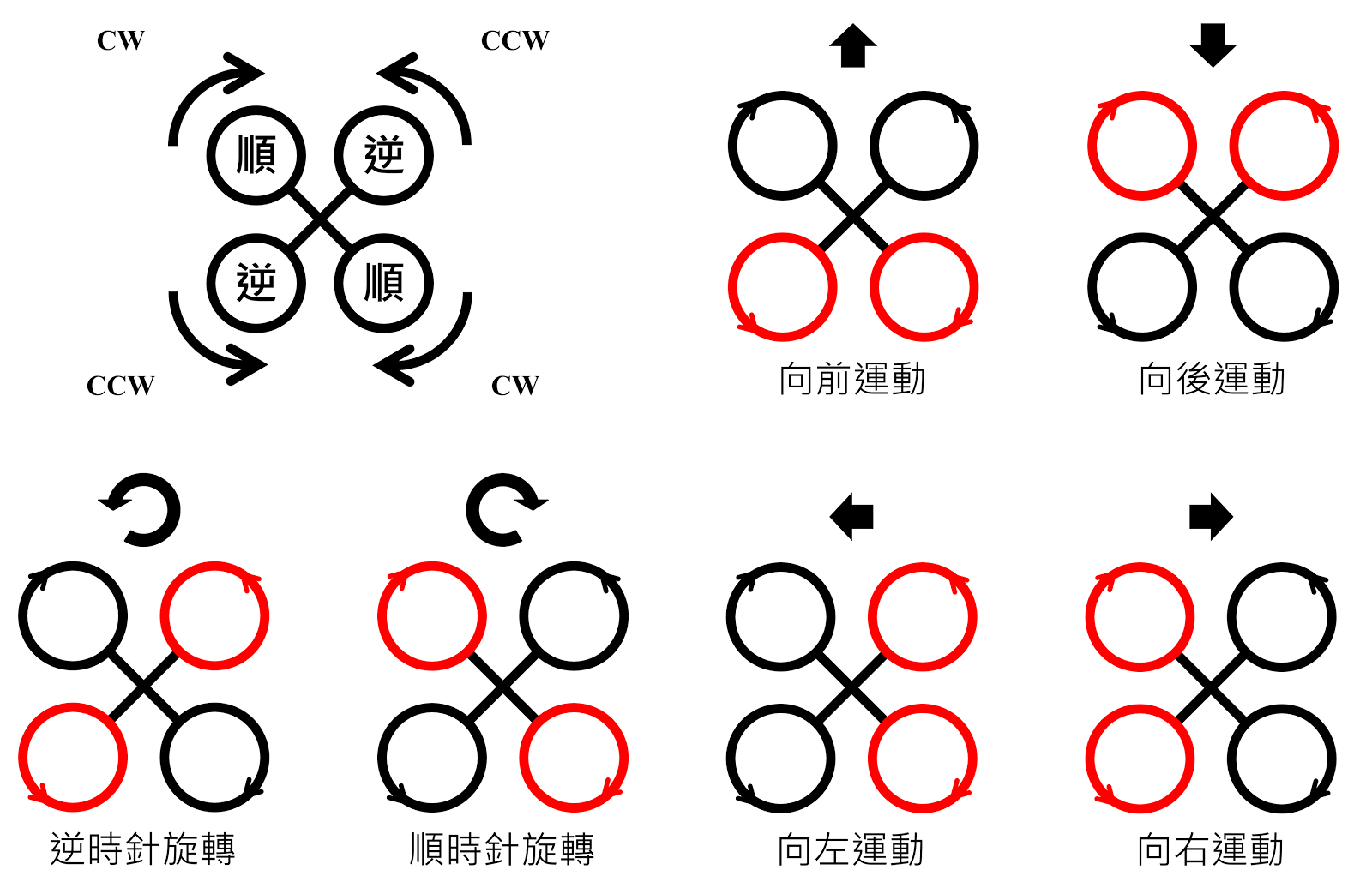
四軸飛行器飛行的原理:
飛行器的螺旋槳配置示意圖如下圖的左上角所示(本文默認使用 "x" 形配置,而非 "+" 形),兩兩對角的螺旋槳轉向剛好相反,透過這種配置,來互相抵銷旋轉上的力矩,在已經平衡的情況下,同時增加或減少四個旋翼的推力的話,可以做出上升與下降的動作,同時增加或減少相鄰的兩個旋翼的推力,可以做出前後左右運動的動作,若同時增加或減少對角旋翼的推力時,則可以做出順逆時針旋轉的動作,而任何的飛行運動都可以由上升、下降、前後左右、順逆時針旋轉的運動所組成。