感測器原理
四軸飛行器上面常會使用一些感測器做為回授,來取得飛行器的姿態、航向或是高度等資訊,常見有陀螺儀、加速度計、磁力計以及氣壓計這四種,由於微機電系統(Micro Electro Mechanical System, MEMS) 技術的發達,把機械系統縮小到微米(10E-6)或是奈米(10E-9)等級,使的這些感測器得以封裝起來,變成小的 IC。
慣性測量單元(Inertial Measurement Unit, IMU)捕捉物體運動的資訊、測量物體姿態的一種電子元件,又稱為慣性感測器,主要由陀螺儀(Gyroscope)與加速度計(Accelerometer)組成,部分的應用中有時也會加入磁力計(Magnetometer)與氣壓計(Barometer)來輔助估算相關訊息,經常使用在載具的導航上面。
在四軸上面四種感測元件主要的功能:
- 陀螺儀 → 通常做為主要姿態的計算,優點是反應快,但缺點是誤差容易累積
- 加速度計 → 可以透過重力加速度來校正陀螺儀,運動加速度部分也可以用來計算位移與速度等
- 磁力計 → 同樣也是輔助、校正陀螺儀,解決重力加速度無法檢測到水平角度旋轉的問題
- 氣壓計 → 計算飛行器高度
上述四種感測器的種類與型號眾多,但依輸出可以分成數位與類比兩種,數位輸出通常使用像是 SPI、I2C 等通訊介面來獲取感測器資料,電路處理上較簡單,功能較多,可能包含濾波器等,而另一種則是類比的輸出,輸出的資料大小會與電壓成正比,會把原始感測到的資訊直接輸出,雖然原始,但比較靈活,通常使用 ADC 來讀取電壓資訊。
在感測器選型時,常常會看到一軸陀螺儀、三軸加速度計等等,其軸數表示為可以感測到物理量的分量,沒有方向的物理量像是溫度、氣壓等,都是單軸就可以得到完整的資訊,但有方向的物理量像是角速度、加速度等,會將物理量投影到軸上,投影就像是把一個建築物(三維)畫在紙(二維)上一樣,在紙上你看不到建築物的後面,但實際上你可以走到建築物後面看,所以軸越多,可以感測到的資訊就越完整。
一直生存在一維空間的生物,就像活在線上,他們只知道前後走,沒有左右的概念,一直生存在二維空間的生物,就像活在紙上,只知道前後左右走,沒有上下的概念,一直生存在三維空間的生物,不只可以前後左右走,還可以上下移動,能做的、能看到的東西都比一維、二維生物來的多,那四維空間的生物會看到甚麼?能做甚麼?這我也不知道,畢竟大部分的人都已經習慣三維空間了,要往高維度的空間去思考是困難的。
在說明之前,我們先定義兩個座標系統,世界座標系G以及載體座標系L,世界座標系為地球座標,載體坐標系對準載具,感測器因為放置在載具上面,所以讀取的數值都是相對於載體座標系,除非不同或是需要注意才會再行標示。
這裡以三軸陀螺儀、三軸加速度計、三軸磁力計和氣壓計做說明,首先要先了解三軸之間的關係,假設有三個向量 X、Y、Z,其方向分別為三個軸的方向,那這三個向量會互相垂直、正交(Orthogonality),也就像是 X dot product Y = 0 或 X cross product Y = Z,實心點垂直於螢幕出來,叉叉點垂直於螢幕進入,可以用右手定則來了解。

陀螺儀(Gyroscope or Gyro)
陀螺儀是測量角速度的元件,陀螺儀有短時間準確、靈敏的特性,但用來計算角度時,長時間下的誤差累積會使其變的不可靠,通常我們以 dps(degree per second)來表示角速度,角速度與速度不同,角速度是單位時間內旋轉的角度,而速度則是單位時間內移動的距離,所以若是沒有旋轉是沒有角速度的,若只對 X 軸旋轉,則 Y 軸與 Z 軸的輸出為 0,X 軸的輸出為旋轉的角速度。

下面一張圖是角度、角速度、角加速度的關係,紅線是角速度,綠線是角加速度,角速度的一階微分,藍線是角度,角速度的一階積分,所以只要知道取樣時間以及角速度,就可以對其作積分得到當下的角度了。

但是實並非如此,原因就在於感測器都會有誤差與雜訊,如何把誤差與噪音雜訊給濾除掉也是一門學問,下面的數學式子表示從感測器讀到的角速度 w_measure 會等於矩陣 R_gyro 乘上理想的角速度 w_ideal 加上偏移 w_bias 與雜訊 n_noise,矩陣 R_gyro 包含未對準誤差(Misalignment)以及單位轉換(dps/LBS),若感測器與載具完全對準的情況(大部份安裝不准等情況會造成未對準誤差),矩陣 R_gyro 會是一個對角矩陣(Diagonal Matrix),偏移 w_bias、雜訊 n_noise 則由溫度、感測器內部等干擾引起。
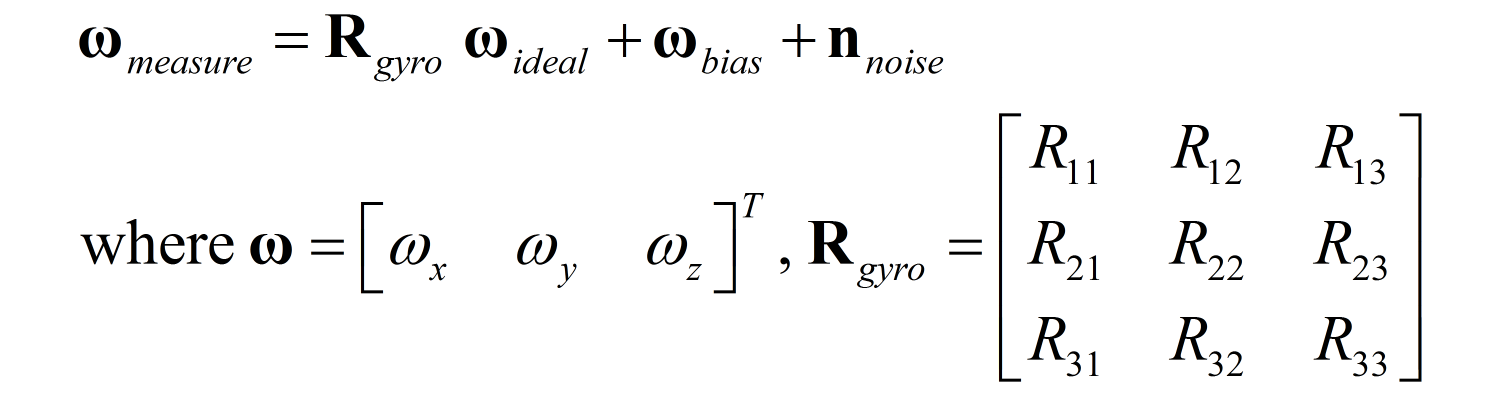
理想的角速度 w_ideal 是我們想要的,所以校正的動作其實就是把 R_gyro、w_bias 與 n_noise 求出來並去除。
加速度計(Accelerometer or G-Sensor)
加速度計是測量加速度的元件,除了運動加速度外,也包含地球質量所產生的重力加速度,也就是當感測器自由落體時,運動加速度與重力加速度會剛好抵銷,有輸出都會變成 0,通常以 g 或是 m/s^2 來表示,因為可以感測到重力加速度,所以在有重力的環境中加速度計也常用來做傾斜計,透過重力在三軸上的投影來計算角度。
加速度計常常會搭配陀螺儀來應用,因為重力加速度並不會隨時間快速變化,長時間具有可靠性,所以通常透過此特性來較正陀螺儀,防止誤差的累積。
下圖是在靜止下(僅存在 1g 的重力加速度),不同角度的加速度計,角度 1~8 的 Z 軸因為垂直於重力加速度,所以皆為 0g,
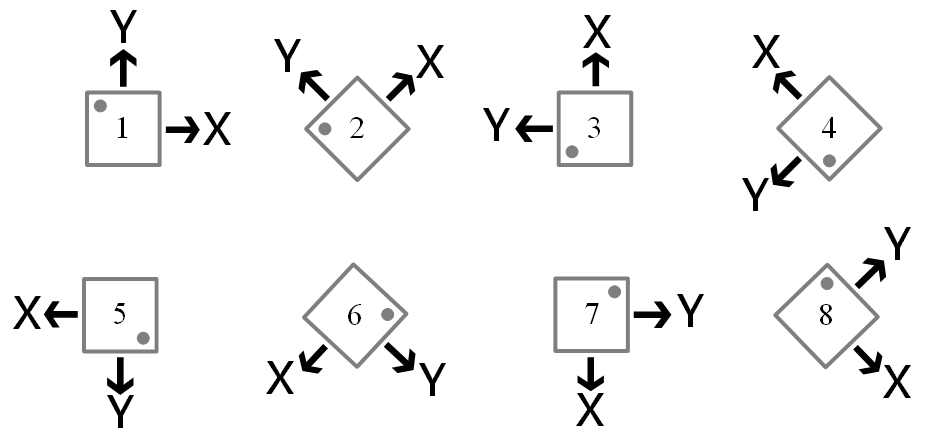
角度 1 ( 0 deg)的輸出(0, +g, 0)
角度 2 ( 45 deg)的輸出(+0.707g, +0.707g, 0)
角度 3 ( 90 deg)的輸出(+g, 0, 0)
角度 4 (135 deg)的輸出(+0.707g, -0.707g, 0)
角度 5 (180 deg)的輸出(0, -g, 0)
角度 6 (225 deg)的輸出(-0.707g, -0.707g, 0)
角度 7 (270 deg)的輸出(-g, 0, 0)
角度 8 (315 deg)的輸出(-0.707g, +0.707g, 0)
歸納出 → X = g_sin(theta), Y = g_cos(theta) → theta = atan(X / Y)
表示在 Z 軸垂直於重力時,輸出的 X, Y 值相除,並取 atan 則可以得到傾斜角度,但需要注意的,這僅限於靜止下,當有運動加速度的影響,得到的角度會是不準確的。
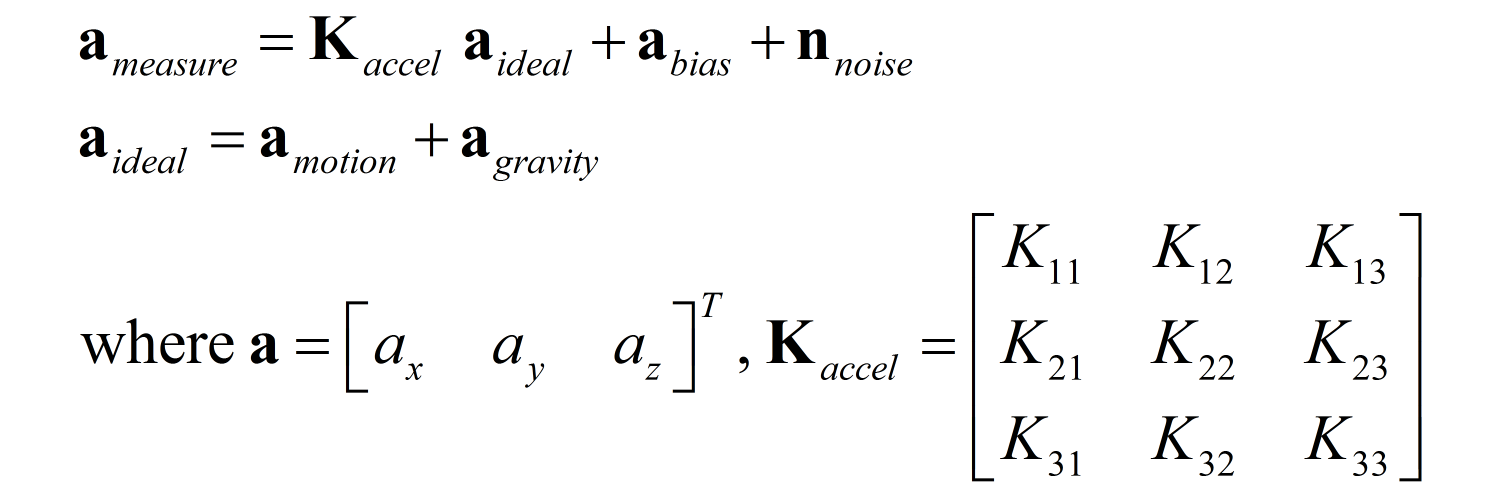
下面是一個加速度計的簡單數學模型,與陀螺儀類似(其實大家都長得差不多),加速度計的輸出 a_measure 會等於矩陣 K_accel 乘上理想的加速度 a_ideal 加上偏移 a_bias 與雜訊 n_noise,理想的加速度 a_ideal 包含運動加速度 a_motion 以及重力加速度 a_gravity,矩陣 K_accel 包含未對準的誤差以及單位的轉換(g/LBS),若感測器與載具完全對準的情況,矩陣 K_accel 也是一個對角矩陣,偏移 a_bias、雜訊 n_noise 則也會由溫度、感測器內部等干擾引起。
磁力計(Magnetometer or Compass)
磁力計或電子羅盤是用來測量磁場的元件,通常以高斯(Gauss)或特斯拉(Tesla)來表示磁場大小,因為地球本身存在磁場,所以磁力計可以藉由磁場在三軸上的投影來計算出航向角度,但事實上環境中的磁場不僅僅只有地球磁場,還包含了許多的干擾源,依特性可以分成硬磁(Hard Iron)干擾與軟磁(Soft Iron)干擾,硬磁干擾是像永久磁鐵、電池這些指固定強度的干擾,軟磁干擾則是指像電磁鐵、電量變化等,當磁力來源消失時,磁力會變弱,會改變磁力線強度或方向的干擾。
下圖是將以磁力計 X 軸與 Y 軸為座標在不同影響下畫出來的圖,紅色是理想、不受干擾的磁場,是一個圓心在原點的圓形,綠色是受到硬磁干擾的磁場, 也是圓形的磁場,但圓心會編離中心,深藍色是受到軟磁干擾的磁場,會讓圓形變形成橢圓形,但圓心仍在中心,淺藍色是同時受到硬磁與軟磁干擾的形況,偏離中心的橢圓形,這也是大部分磁力計測到的圖形,如果不校正成圓形的話,在行像的計算就會產生誤差,導致問題出現。

下面是一個磁力計的簡單數學模型,磁力的輸出 h_measure 會等於矩陣 M_mag 乘上理想的磁場 h_ideal 加上偏移 h_bias 與雜訊 n_noise,矩陣 M_mag 包含未對準的準誤、單位的轉換(gauss/LBS)、硬磁干擾、軟磁干擾,偏移 h_bias、雜訊 n_noise 則也會由溫度、感測器內部等干擾引起

氣壓計(Barometer)
氣壓計是用來測量氣壓的元件,通常使用帕(Pa)或百帕(hPa)來表示,一個大氣壓力大約是 1013.25 hPa,大氣壓會隨著高度的提升而下降,其關係為每上升 9 公尺,大氣壓力降低 100 Pa,透過此關係可以使用氣壓計計算出目前的海拔高度,以目前 MEMS 氣壓計可以做到 1 Pa RMS 的高解析度情況下,大約可以檢測到 9 公分的高度變化,但這都在是比較理想的情況下,實際上還會有空氣的流動、溫度與濕度的影響,使得計算、測量的誤差產生。
詳細的感測器校正方法之後會再說明,這一章只先說明感測器的一些原理與模型。
下面這篇文章值得參考:
A Guide To using IMU (Accelerometer and Gyroscope Devices) in Embedded Applications
http://www.starlino.com/imu_guide.html