飛行器組成
一台可以操作的簡單四軸飛行器大致架構如下,由兩對正反槳、四顆無刷馬達、四個電子調速器、一顆電池、一個飛行控制以及一個接收機與遙控器所組成,這裡不探討額外的設備像是 GPS、FPV 等裝置。

四軸飛行器機身(Frame)
用來放置控制器、馬達、電池…等等的平台。通常我們會用對角馬達的軸距(M2M)來敘述機身的大小,如果對角馬達的兩個轉軸相距 250mm 的距離,則稱為 250 機身。
機身的大小,會影響螺旋槳的長度與馬達的選擇,進而影響到負載的大小,而機身的剛性(Stiffness),也會影響到馬達所產生的震動大小以及運動效能方面的影響。
Thingiverse 上的一個 250 機身的 3D 模型:http://www.thingiverse.com/thing:34552

圖片來源:http://www.thingiverse.com/make:94944
螺旋槳(Propeller)
安裝在馬達上,並透過馬達旋轉來產生推力的裝置。四軸中有兩對螺旋槳,一對螺旋槳順時針旋轉,另一對螺旋槳則是逆時針旋轉,並不是所有螺旋槳都一樣的,所以在購買的時候都會選擇正反槳。通常會用像 1045 或 10x4.5 的方式來分別不同規格的螺旋槳,其意思為直徑10 inch,螺距 4.5 inch。
在相同轉速下,螺旋槳越長,攻角越大,所提供的升力就越大,但所受到的阻力亦會越大,所以轉動大的槳需要扭力大的馬達。

圖片來源:http://www.rctigermotor.com/html/2013/prop_0904/26.html
電子調速器(Electronic Speed Controller)
用來驅動無刷馬達的裝置,藉由此裝置可以簡化無刷馬達的控制,通常市售的電調只需輸入 PWM,並透過調整 PWM 的占空比即可控制無刷馬達轉速,但也有像是 I2C、CAN Bus 等方式控制的電子調速器。
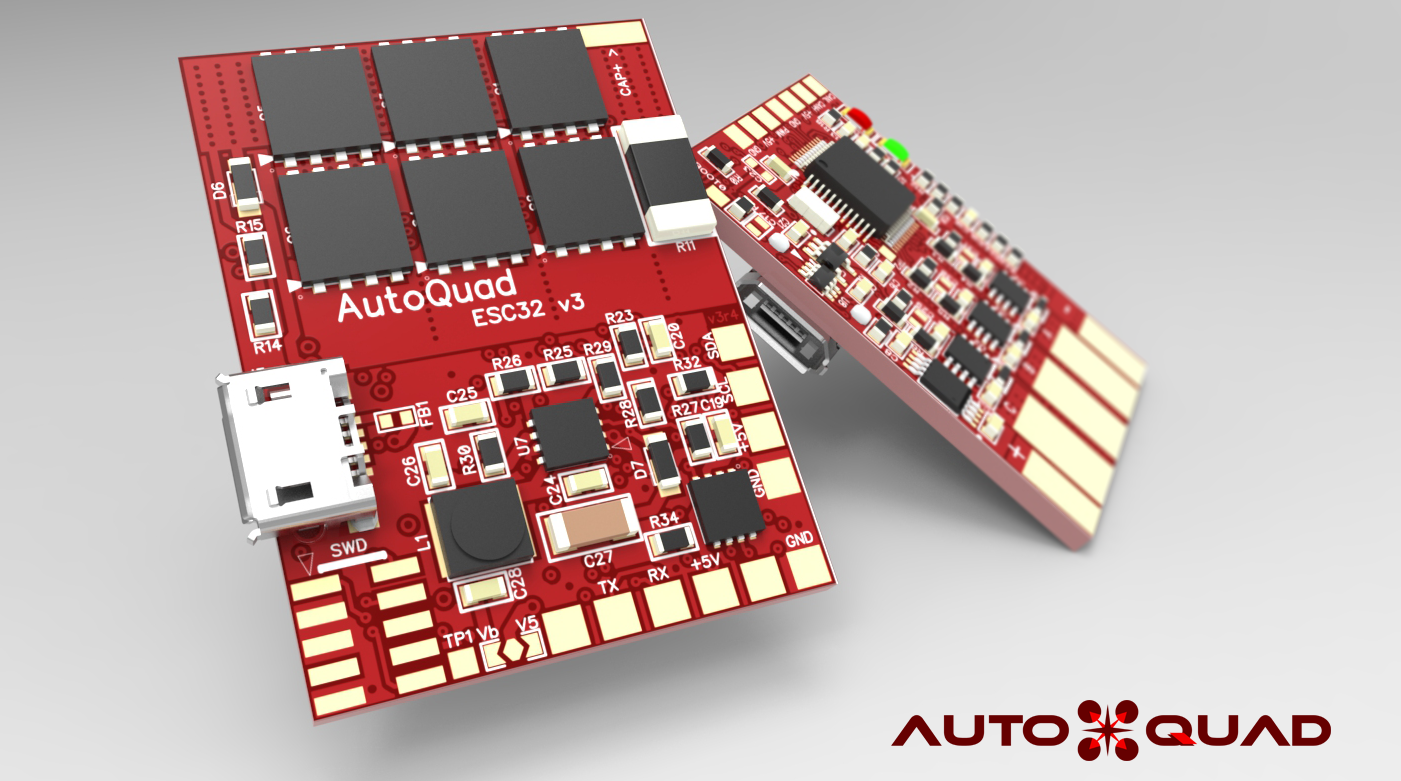
圖片來源:http://autoquad.org/esc32/
鋰聚電池(Lithium polymer battery, Li-Po Battery)
提供控制板與馬達電源的來源,鋰聚合物本身的化學材料特性在正負極的跨壓大約 3.3~4.2V左右,使的單節(one cell)鋰聚電池的電壓平均大約為 3.7V 左右,若串聯兩節鋰電池,則有 7.4V 的電壓,我們通常會用 11.1V 3S 2200mAh 25C/35C, 來敘述一個鋰聚電池的規格,其表示輸出 11.1 V 電壓、最大放電 25C(2.2 25 = 55A)、瞬間放電 35C(2.2 35 = 77A)。
其實鋰聚電池雖然是一個很棒的電源來源,但從上速規格的電池,瞬間輸出可以達到 77 安培的電流,當電池充飽後瞬間輸出功率快達到 1000W,在安全性上面不容小覷,使用上需要小心,下面有一個影片在實驗不同外力下鋰聚電池的冒煙、膨脹、燃燒等情況。
Youtube - Lipo battery combustion test鋰聚合物(手機)電池燃燒實驗 by RC Mania
https://www.youtube.com/watch?v=eZxDC-whz14
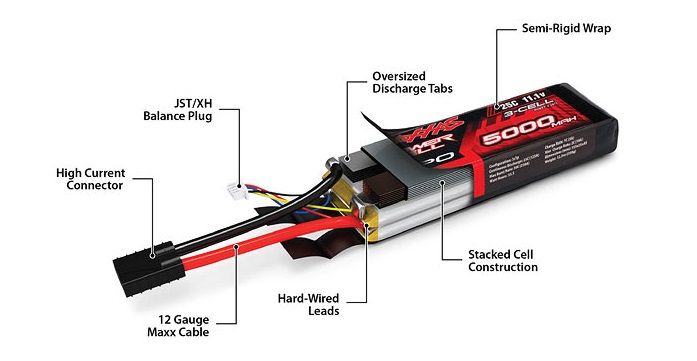
圖片來源:https://traxxas.com/products/parts/batteries/powercellbatteries/lipo
飛行控制器(Flight Controller)
控制飛行器平衡、運動的裝置,這裡簡稱飛控板,飛控板是一個集成微控制器、感測器... 等的裝置,以人來比喻,就像是大腦和中樞神經,絕大部分的訊息都在這裡做處理,這也是四軸飛行器的核心控制部分。
![]()
圖片來源:https://pixhawk.org/modules/pixhawk
遙控器(Remote Controller)
遙控飛行器、給予飛行器控制指令的裝置,需要與接收機做搭配傳輸訊號。
